In this version
- Proof-of-concept build
- Custom algorithm for increased measurement accuracy
- Data logging to computer
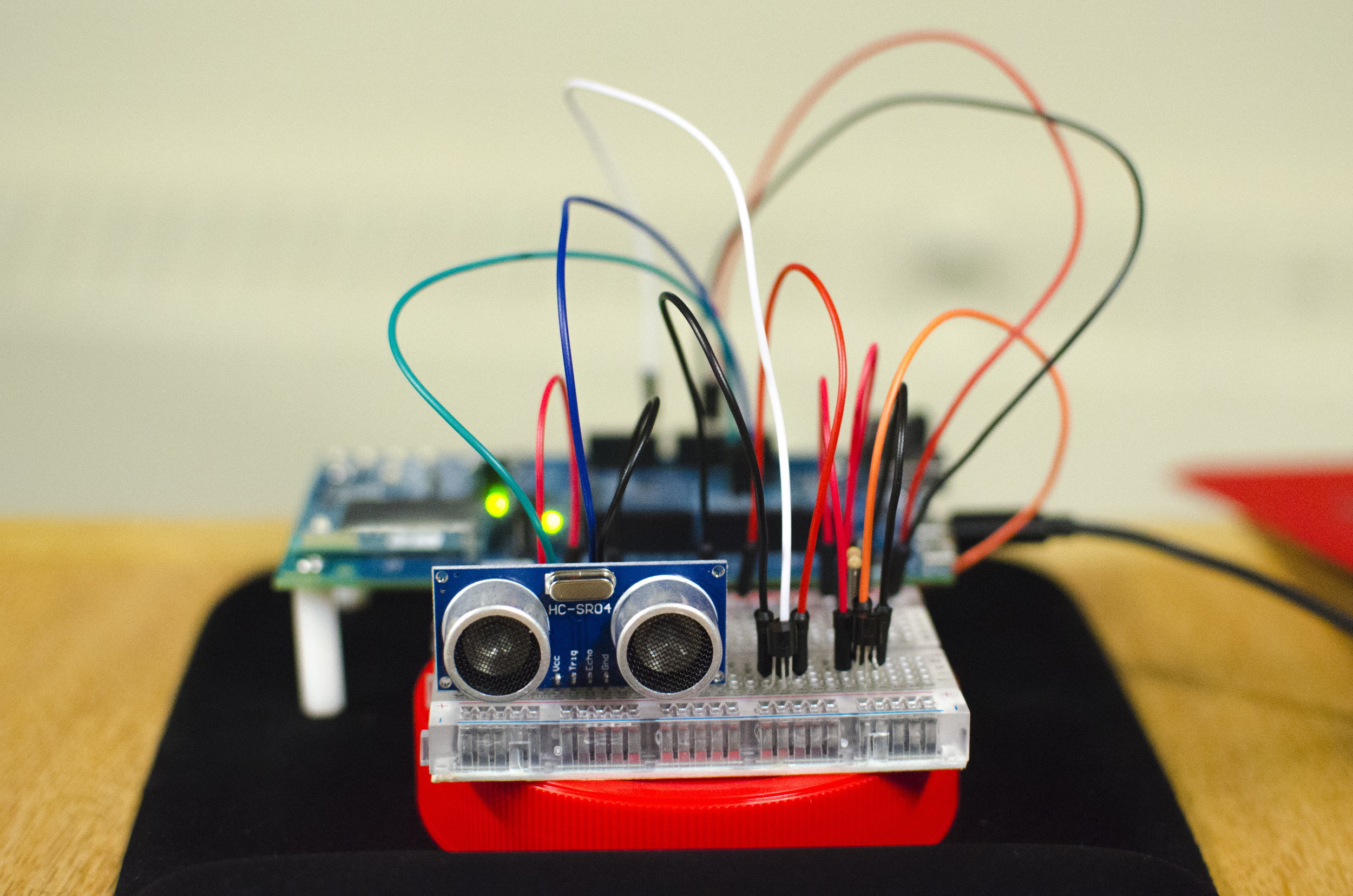
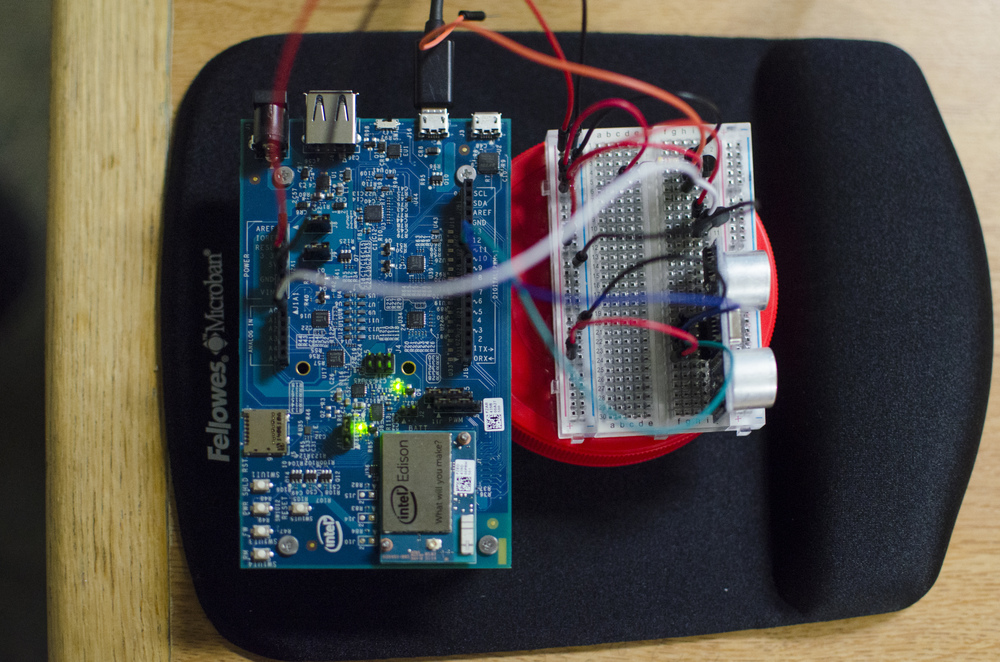
Proof-of concept build
The setup below is a proof-of-concept build of a distance-time sensor. The current hardware setup uses an Intel Edison as a microcontroller and collects data via an ultrasonic sensor and an analog temperature sensor.
Custom algorithm for increased measurement accuracy
Quantus uses an ultrasonic sensor to measure the time taken for a high-frequency sound pulse to be emitted, travel to an object, then return (a similar to echo location used by bats and dolphins). To calculate the distance, one must multiply the time taken for the sound pulse to travel to the object with the speed of sound in air. However, using the standard speed of sound in air (i.e. 343.2 m/s) yields a significant bias in the distance data because the speed of sound depends on ambient conditions. I researched how to calculate the speed of sound in air based on the ambient temperature, pressure, and humidity, then developed an algorithm to do so. Temperature is collected with an analog sensor. Pressure and humidity are predefined because they do have a significant contribution on the overall result. This results in much more accurate data.
To test Quantus, I rolled a water-filled peanut butter down a ramp and measured the distance at a frequency of 20 Hz. When analyzing these data, 99.92% of the variation in displacement can be represented by the approximate quadratic relationship with time. Additionally, the numbers produced agree with my ruler measurements.
Log data to computer
Right now Quantus is controlled by my computer and outputs data to the serial monitor. Ultimately, I plan to make the final product untethered such that a computer connection is not necessary to capture the data. Therefore, all computations are performed on the device. One idea is to make the device Wi-Fi enabled such that it can be controlled via a browser and save the data it collects in the cloud.